Robot swarms and AR visualization
ARTUISIS - Augmented Reality and Tangible User Interface to Supervise and Interact with robot Swarms
Project funded by the French National Research Agency, led by Jérémy Rivière
Abstract
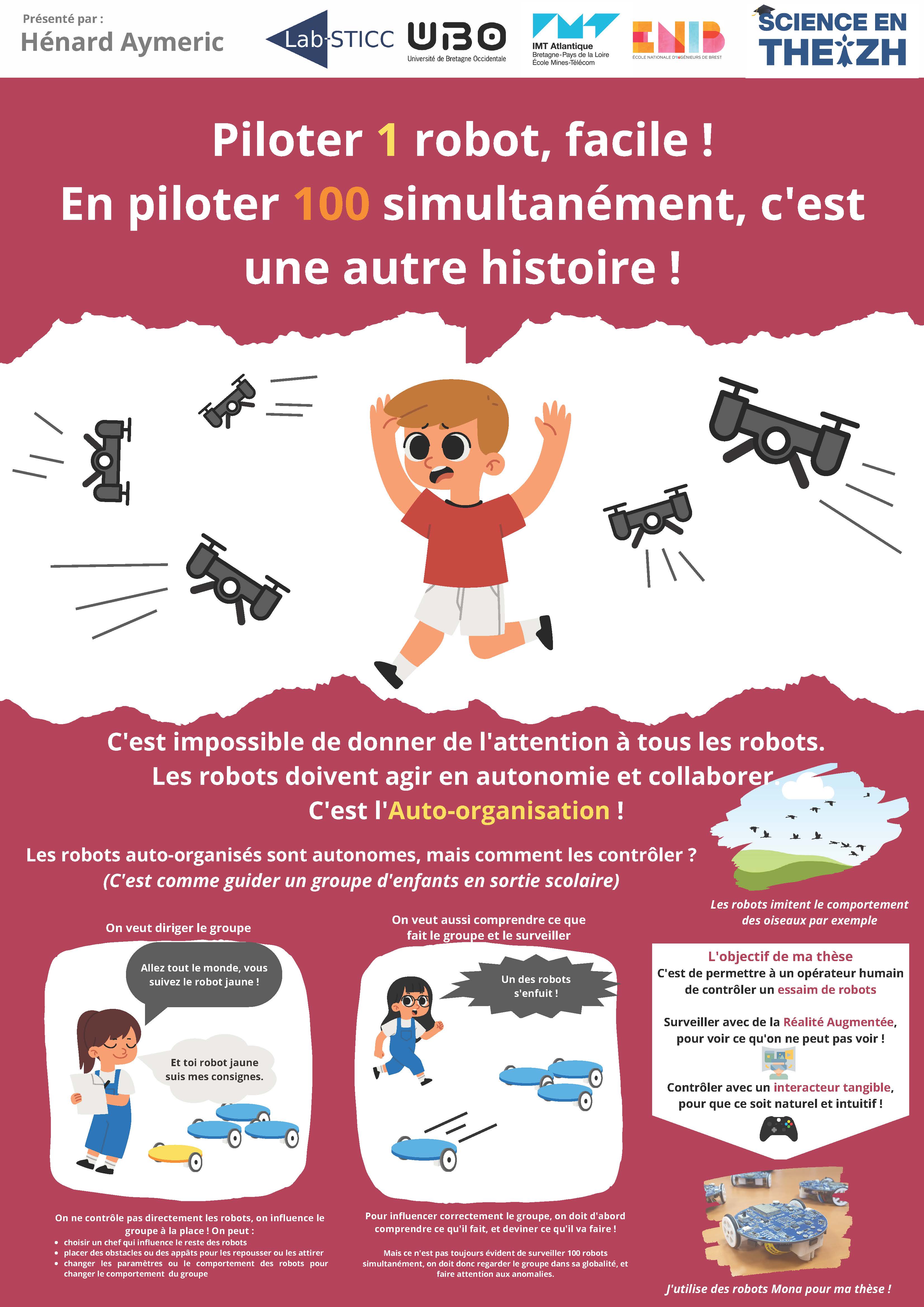
Robot swarms are decentralized systems, composed of a large number of small and autonomous robots, capable of collective exploration, movement coordination, or dynamic task distribution among themselves. These capabilities usually come from bio-inspired of physics-inspired algorithms which define the behavior of a robot according to its state at time t and its perception and action capabilities, the global behavior of the swarm emerging from local interactions between these robots.
By their very nature, robot swarms exhibit properties of self-organisation, robustness, and ability to scale. that are very useful, but which make supervision (visualisation and understanding) and control by a human operator very difficult. The very source of these properties, the emergence of the swarm behaviour from the interactions between the robots, prevents the operator from maintaining a correct mental model of this behaviour over time.
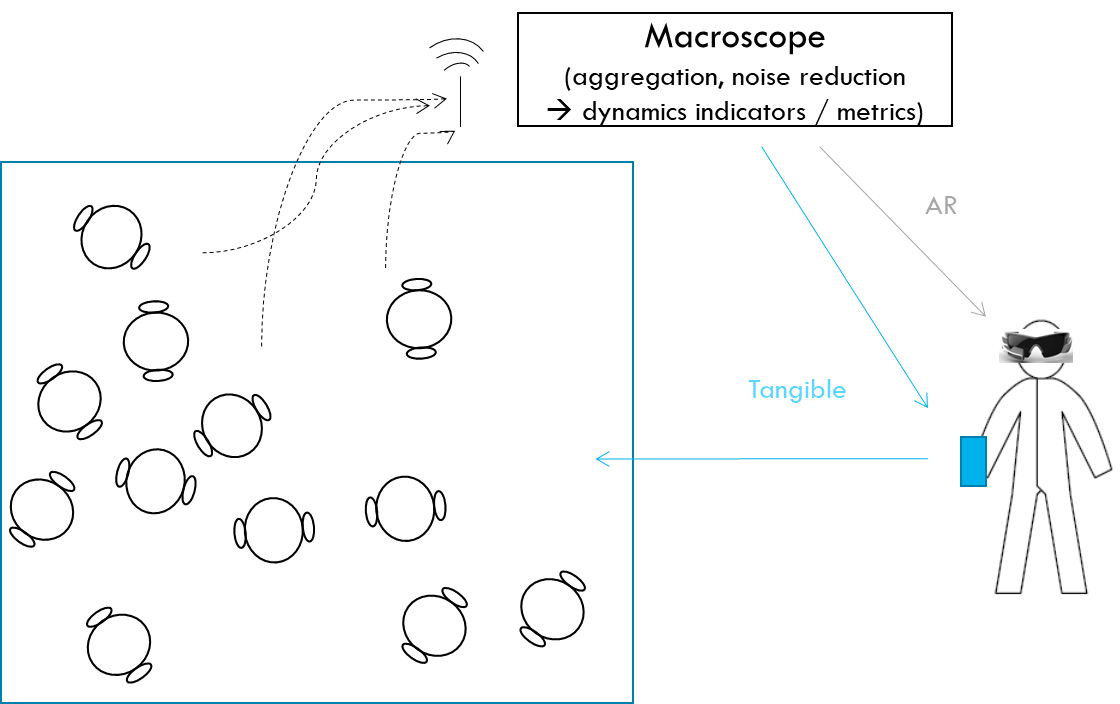
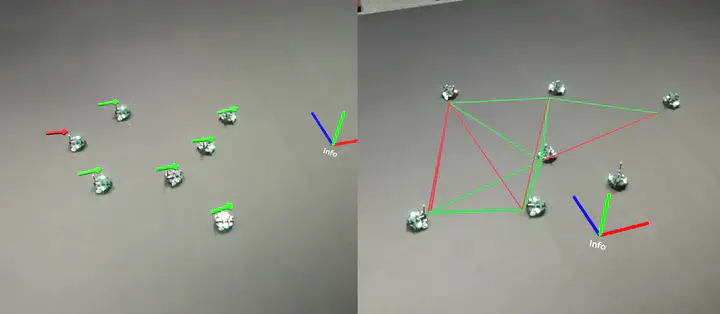
The ARTUISIS project focuses on the basic behaviours that lead to the spatial self-organisation of robot swarms, such as flocking, aggregation or area coverage. It aims at allowing an operator to:
- Understand the core mechanisms of this self-organisation,
- Supervise the behaviour dynamics,
- Affect the spatial self-organisation in an intuitive, ergonomic and efficient way.
People involved
Principal investigator

Researchers


PhD Student

Research Engineer
Interns


Media